
41.3K
Let’s dive into the fascinating world of FPV drone motors! In this comprehensive guide, we’ll explore the ins and outs of motor construction, design features, and the factors that can influence a motor’s performance and efficiency. Having a solid understanding of the design choices involved will equip you with the knowledge to pick the ideal motor for your next drone build.

Some of the links on this page are affiliate links. I receive a commission (at no extra cost to you) if you make a purchase after clicking on one of these affiliate links. This helps support the free content for the community on this website. Please read our Affiliate Link Policy for more information.
If you’re still unsure about which motor to choose, don’t worry! I’ve got you covered with my top FPV drone motor recommendations: https://oscarliang.com/top-5-best-motors-mini-quad/
Recommendations
The “best motor” for an FPV drone depends largely on your flying style, requirement, and budget. Personally, I use my quads for freestyle, long range, and occasionally racing and aggressive flying. Therefore, I prefer versatile motors with balanced performance.
Wondering what motor size and KV you should use? Follow this link to a table of recommendations by frame size, propeller size and battery voltage: https://oscarliang.com/table-prop-motor-lipo-weight/.
Motors for 5-inch
When selecting motor KV, 1600-2100KV is for 6S, while 2300-2800KV is for 4S. Higher KV options tend to be more aggressive and power-hungry, while lower KV options are conservative and efficient.
T-Motor Velox Veloce V2207.5 V2
Budget Motor with Decent Quality

At $14.9 a piece, the Velox V2207 V2/V3 is perhaps the cheapest worth having motors you can buy today. It’s a budget offering from T-Motor with modern design and features: N52 magnets, titanium shaft and manufactured by the reputable T-Motor. They offer different KV options, for cinematic and endurance types of flying, I think 1750KV is great on 6S. For racing or more aggressive freestyle flying opt for 1950KV-2050KV. For 4S battery, opt for 2550KV.
Get the T-Motor Velox from:
RDQ: https://oscarliang.com/product-ahy5
GetFPV: https://oscarliang.com/product-gch4
AliExpress: https://s.click.aliexpress.com/e/_DDjg899
Amazon: https://amzn.to/3Qp4W1Z
EMAX ECO II 2207
Cheapest Worth Having

These motors have strong N52 magnets and solid build quality at an attractive price point. While you can find motors for less money they are rarely worth buying.
According to rumour, Emax is selling the ECO II motors at a lost, just trying to match the cheapest motors on the market. I found it to be believable because this motor is only $16! We have no way to prove it, but the Emax ECO II has been proven to be some of the best budget FPV motors over the years.
Perhaps not the best motor for raw performance, but you can’t really ask more as they are probably the cheapest worth having motors currently available. These are great if you are just starting out or want to build a basher. It’s also an extremely efficient motor if flight time is important to you.
They offer 1700KV and 1900KV for 6S, 2400KV for 4S. They also do 2306 motor size too, but personally I prefer the bigger stator size 2207, it’s more powerful and responsive for the same price.
Purchase the EMAX ECO II 2207 from:
AliExpress: https://s.click.aliexpress.com/e/_DBfROTx
RDQ: https://oscarliang.com/product-6vdt
GetFPV: https://oscarliang.com/product-8mns
NBD: https://oscarliang.com/product-vc8d
Amazon: https://amzn.to/3wQE9Ey
iFlight Xing2 2207
Tried and True

It has most of the desired features in a modern FPV drone motor: unibell design, titanium shaft, slotted arc magnets for faster response, strong N52 magnets and a protective o-ring to keep the bearings smoother for longer.
Apart from the distinctive and unique curved unibody motor bell that makes it super durable, the Xing2 2306 and 2207 motors also come with lots of great features. For example, a single piece titanium alloy motor shaft, robust 9x4x4 bearings, single-strand winding, and the damping ring between bell and bearing that improves durability.
The Xing2 is a powerful motor with high torque, which translates into responsiveness and snappiness in flight. For $21 per motor, you are getting a top tier performance motor that are normally sold around the $30 price range, making it extremely good value. I have been flying the Xing2 on my new Source One V5 build, and it’s one of the smoothest in my fleet.
The iFlight Xing2 motor line-up offers many different KV depending on what LiPo voltages you plan to use (4S or 6S), propellers and flying styles. For 2207, there are 1855KV (6S) and 2755KV (4S), for 2306, there are 1755KV (6S) and 2555KV (4S).
Get the iFlight Xing2 2207 here:
AliExpress: https://s.click.aliexpress.com/e/_DefjM73
RDQ: https://oscarliang.com/product-2bz1
GetFPV: https://oscarliang.com/product-hzvo
Banggood: https://oscarliang.com/product-ag8w
Amazon: https://amzn.to/3OJa4v3
Motors for 7-inch
Here are my motor recommendations for 7″ FPV drones. Our focus is on efficiency at cruising speeds for longer flight times and smoothness to minimize vibration and heat. These factors are essential since 7″ drones are typically used for long-range flying. For 6S setups, 1300KV motors are ideal, while for 4S, you might want to opt for 1500KV or higher.
EMAX ECO II 2807 1300KV
Heavy Motor that Delivers Outstanding Performance

The EMAX ECO II 2807 motor is a heavyweight contender in the 7-inch quad category. Weighing around 54 grams with 7-inch wires, this motor stands out with its larger stator size. It features multicore windings, a two-piece bell design, and an M2 shaft screw.
Performance-wise, the EMAX ECO II 2807 offers a robust combination of thrust, torque, and efficiency. Its high torque ensures a responsive and stable flight experience, which is crucial for capturing smooth footage. While the added weight might be a disadvantage for those mindful of their drone’s total weight, the EMAX ECO II 2807 excels in delivering power and stability, making it a solid choice for pilots looking for power and stability in their 7-inch quad setup.
Get the EMAX ECO II 2807 here:
AliExpress: https://s.click.aliexpress.com/e/_DC1zRl3
RDQ: https://oscarliang.com/product-i258
GetFPV: https://oscarliang.com/product-yn40
Amazon: https://amzn.to/3RLyvLL
T-Motor F90 2806.5 1300KV
Lightweight and Efficient Motor

The T-Motor F90 2806.5 1300KV is one of the most efficient motors for 7-inch drones, offering balanced performance. It is relatively low in responsiveness, making it more suited for long-range builds rather than freestyle flying.
If you prioritize efficiency and long flight times, this motor is worth considering. For those seeking lightweight motors but with more responsiveness for freestyle, the Flyfish Flash 2806.5 might be a good alternative.
Get the T-Motor F90 here:
AliExpress: https://s.click.aliexpress.com/e/_Del6L3f
RDQ: https://oscarliang.com/product-fq2e
GetFPV: https://oscarliang.com/product-t3k7
Amazon: https://amzn.to/47P8Q9y
Motors for 3-inch
Motors for 4-Inch and Ultralight 5-Inch (Sub250) Drones
Under 250-gram 4″ and 5″ builds are gaining popularity due to recent drone regulations. Here are some top choices in this category.
Emax ECO II 2004
Best Value in its Class

The Emax ECO II 2004 motor is a standout budget option in its class. It delivers reliable performance without breaking the bank, making it a solid choice for cost-conscious builders. Get 3000KV for 4-inch on 4S, 2000KV for 5-inch on 6S.
Get the EMAX ECOII 2004 here:
AliExpress: https://s.click.aliexpress.com/e/_DmBpqF1
RDQ: https://oscarliang.com/product-05va
Where to Begin?
If you’re new to the FPV scene, I highly recommend checking out our beginner’s guide to FPV drones first for the basics: https://oscarliang.com/fpv-drone-guide/
Before choosing a motor, it’s important to have at least a rough idea of the size and weight of the drone you plan on building. I’ll walk you through the process of determining motor size based on the drone you are trying to build, but if you’re focusing on building a 5″ FPV drone, feel free to skip ahead to the “Motor Size” section.
Some of the most crucial factors to keep in mind include:
- Motor weight
- Power (thrust)
- Efficiency (grams per watt)
- Torque and response (RPM changes)
Brushless vs. Brushed Motors
In the world of FPV drones, there are two primary motor types: brushless and brushed motors. Generally, we tend to brushless motors as they are more durable and powerful, while brushed motors are often used in cheap toy drones as they are more cost effective to make. In this guide, we’ll be focusing solely on brushless motors, which are the go-to choice for modern FPV drones.
Estimating Drone Weight and Frame Size
When considering your FPV drone’s total weight, make sure to account for all components: frame, FC, ESC, motors, propellers, RX, VTX, antenna, ESCs, LiPo battery, GoPro, and so on. While it doesn’t have to be 100% accurate, a close estimation is essential. It’s better to overestimate the weight and have extra power than to underpower and struggle during takeoff.
By determining your frame size, you’ll be able to establish the maximum propeller size allowed. For more information on propeller selection, check out our guide on how to choose propellers for FPV drones: https://oscarliang.com/propellers/
Determining Thrust Requirements
To calculate the minimum thrust required for your motor and propeller combination, you’ll need the estimated total weight of your drone. A general rule of thumb is that the maximum thrust produced by all motors should be at least double the total weight of the quadcopter. Insufficient thrust can result in poor control response and difficulties to lift off.
For example, if you have a 1kg drone, the total thrust generated by all of the motors at 100% throttle should be at least 2kg. That’s 500g thrust produced by each motor for a quadcopter. Of course, having more thrust available than needed is always a bonus.
For racing drones, the thrust-to-weight ratio (or power-to-weight ratio) should be significantly higher than the example above. Ratios of 10:1 or even 14:1 are not uncommon. For acro and freestyle flying, I recommend having at least a 5:1 ratio.
A higher thrust-to-weight ratio gives a quadcopter greater agility and acceleration but can make it more challenging to control, especially for beginners. Even the slightest throttle touch can “shoot the quad into orbit like a rocket.” Piloting skill and experience play a significant role in managing this power.
Even if you only plan to fly a slow and stable aerial photography rig, aim for a thrust-to-weight ratio higher than 3:1 or even 4:1. This not only provides better control but also leaves room for extra payload.
Connecting a Brushless Motor
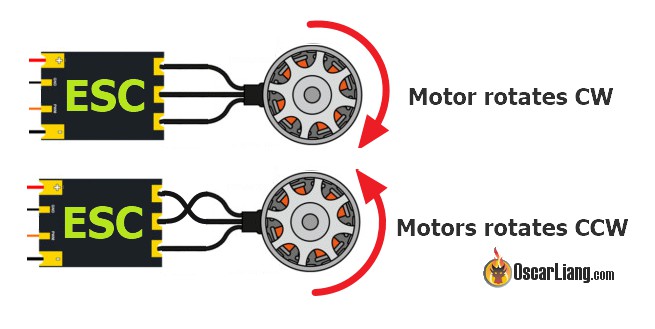
To drive a brushless motor, you’ll need an ESC (electronic speed controller). Unlike brushed motors that have only two wires, brushless motors have three wires. You can connect these wires to the ESC in any order. To reverse the rotation direction, simply swap two of the three wires. Additionally, it’s possible to reverse motor direction through software settings: https://oscarliang.com/change-motor-spin-direction-quadcopter/
Motor Size Explained
Brushless motor size in RC is typically indicated by a four-digit number – AABB:
- “AA” represents the stator width (or stator diameter)
- “BB” represents the stator height, both measured in millimetres
The stator is the stationary part of the motor, consisting of “poles” wrapped with copper wires (windings). These poles are made of several layers of thin metal plates laminated together, with an ultra-thin insulation layer in between.
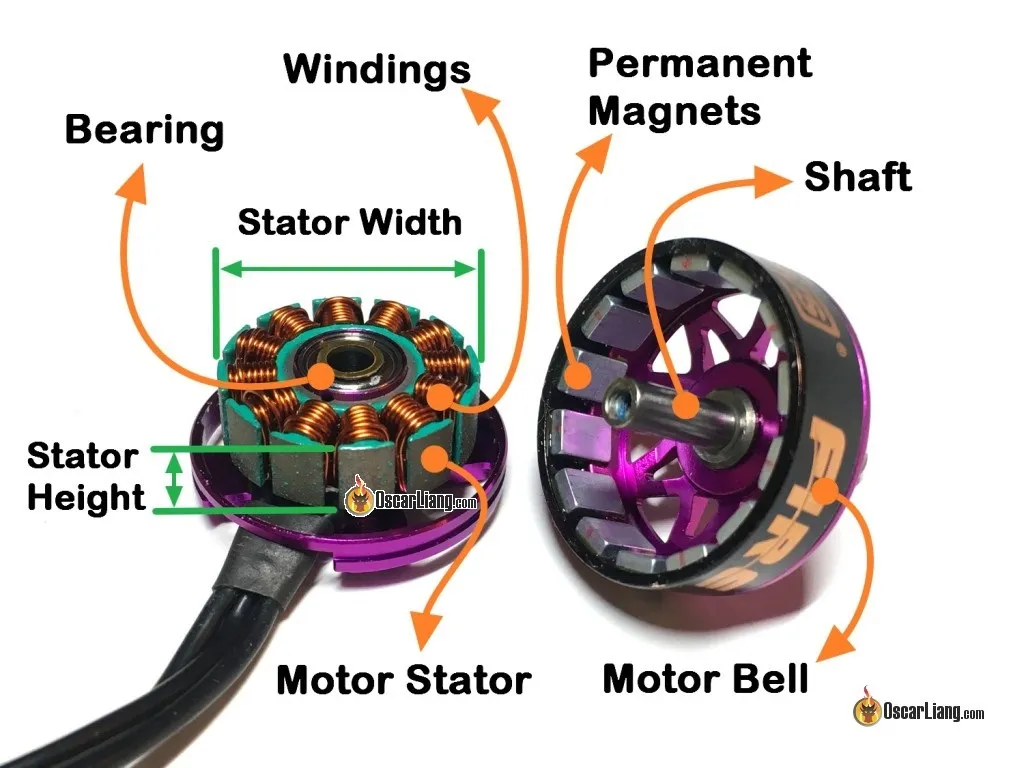
Let’s break down the key components of a motor:
- Motor stator: The stationary part of the motor consists of multiple metal coils. The coil wire is coated in enamel to prevent short-circuiting as it’s wound in multiple loops. When an electrical current passes through the stator coils, it generates a magnetic field that interacts with the permanent magnets on the rotor, creating rotation.
- Magnets: Permanent magnets produce a fixed magnetic field. In FPV motors, they are attached to the inside of the motor bell using epoxy.
- Motor bell: The motor bell serves as the motor’s protective casing for the magnets and windings. Generally made from lightweight metals like aluminium, some motor bells are designed like miniature fans to direct more airflow over the motor windings for additional cooling as the motor spins.
- Motor shaft: Connected to the motor bell, the shaft is the working component of the motor that transfers the torque generated by the motor to the propeller.
Increasing either the stator width or height increases the stator volume, the size of the permanent magnets, as well as the electromagnetic stator coils. As a result, the motor’s overall torque is increased, enabling it to spin a heavier prop faster and produce more thrust (at the expense of drawing more current). However, the downside of a larger stator is that it’s heavier and less responsive.
Comparing Taller and Wider Stators
Wider motors have larger inertia when spinning because the mass of the motor is further from the rotational axis, requiring more energy to change RPM. Consequently, wider and shorter motors are usually less responsive than narrower and taller motors, even if they have the same stator volume and generate the same torque. Wider and shorter motors also have smaller magnets on the motor bell, which can reduce the motor’s power.
However, wider motors offer better cooling due to the larger surface area on the top and bottom. Temperature is crucial to motor performance. As a motor heats up, its ability to generate magnetic flux decreases, impacting efficiency and torque production.
In essence, the width and height of a motor stator represent a balance between responsiveness and cooling. The decision depends on your flying style. For instance, for slow cinewhoops carrying a heavy GoPro, you might want motors with wider stator for better cooling. For fast and responsive racing or freestyle drones, taller stators might be preferred.
Wider stators also allow for larger bearings, which can improve efficiency, smoothness, and longevity.
Bigger stators aren’t always better. For example, 2207 motors can handle typical 5″ propellers, but using much heavier 2506 motors of the same KV may not provide noticeable benefits since they’d produce the same thrust using the same propellers, or even provide worse responsiveness because of the weight. To improve performance without adding weight, consider higher KV motors. The 2506 motor in this example, however, would likely work better for 6″ props than 2207 due to the increased torque requirements.
Motor Torque
High torque motors provide rapid RPM changes and faster response time, leading to less prop wash oscillation and snappier responses.
Motor torque depends on several factors, including:
- Stator size (volume)
- Materials: the type of magnets and quality of copper windings
- Motor construction: such as air gap, number of poles, etc.
Since FPV motors have similar specifications and designs in recent years, stator size is the simplest way to quantify torque.
Stator size can be calculated using the volume of a cylinder formula:
volume = pi * radius^2 * height
For example, a 2207 motor’s stator volume is:
pi x (22/2)^2 x 7 = 2660.93
The larger the stator volume, the more torque a motor can generate. Comparing a 2306 motor with a volume of 2492.85, a 2207 motor has more torque.
When choosing a motor, compare the motor stator volume and weight. A lighter motor with the same volume is preferable, assuming other factors being equal. So, why not pick the largest motor available? The answer lies in weight. Motors with bigger stator volumes are heavier, so it really depends on the application.
For example, lightweight drones don’t require much throttle to stay airborne, leaving more torque available. Paired with lighter pitch propellers, motors can spin them with less torque. In this case, motor torque requirements are low, allowing for smaller, lighter motors that keep overall weight down.
The only time a less powerful motor (with less torque) is preferred is when smoothness is prioritized over responsiveness. High torque motors can change RPM so quickly that they may feel jerky and less smooth. They can also create more voltage spikes and electrical noise in the power system, potentially affecting gyro performance and overall flight performance if noise filtering isn’t optimal, leading to oscillations.
KV
“KV” indicates the number of revolutions per minute (rpm) a motor turns when 1V (one volt) is applied without any load (e.g., propeller) attached to the motor. For example, a 2300KV motor powered by a 3S LiPo battery (12.6V) will spin at approximately 28,980 RPM without propellers mounted (2300 x 12.6). KV is typically a rough estimation specified by the motor manufacturer.
When a propeller is mounted on the motor, RPM decreases drastically due to air resistance. Higher KV motors will try to spin the propeller faster, generating more thrust and power (while drawing more current). Larger props are typically paired with low KV motors, while smaller, lighter props work better with high KV motors.
Motor KV is determined by the number of copper wire windings in the stator. In general, a higher number of winding turns decreases motor KV, while a lower number of turns increases it. The magnetic strength of the magnets can also affect the KV value, with stronger magnets increasing KV.
If a high KV motor is paired with an excessively large propeller, the motor will try to spin fast as it would with a smaller prop, requiring more torque. This increased torque demand will lead to higher current draw and heat generation. Overheating can cause the motor to burn out, as the coil’s coating may melt and cause electrical shorts inside the motor. That’s why a higher KV motor is likely to run hotter than a lower KV motor of the same size.
KV also impacts the current and voltage limits of a motor. Higher KV motors have shorter windings and lower resistance, reducing the maximum voltage rating and increasing the current draw for the motor and propeller combo. However, the motor’s product page will specify the allowable voltage and maximum current.
Betaflight’s “Motor Output” limit allows you to reduce the motor signal and use higher voltage batteries (for example, flying 4S motors on 6S battery). However, while this workaround may work, it can potentially blow your ESC with high KV motors. By limiting motor output, you are setting a limit on how long the MOSFET remains switched on, but you still expose the motor to higher voltage. This is more likely to cause issues than using a lower KV motor rated for the higher voltage. It is recommended to choose the right KV motors for the battery voltage you plan to use.
Not sure how to choose motor KV? Check this table: https://oscarliang.com/table-prop-motor-lipo-weight/
KV vs. Torque Constant
Motor KV does not directly affect torque, but it does impact the torque constant. The torque constant of a motor defines how much current is required to produce a certain amount of torque. KV doesn’t influence the actual torque generated; factors such as magnet strength, air-gap, and coil resistance have a much more significant impact on torque production.
Higher KV motors have a higher torque constant, meaning they need more current to generate the same amount of torque compared to a lower KV motor. To generate the same amount of torque, the higher KV motor requires more current, resulting in additional losses in the ESC, battery, and wires. Moreover, more heat builds up in the motor due to the higher current, less magnetic flux is generated. Overall, a higher KV motor is less efficient if you were to fly at the same speed as the lower KV motor.
Therefore, it’s a good idea not to go overboard on KV; try to keep it moderate. This is especially important when building a long-range rig that prioritizes efficiency and flight time.
Motor Mounting
Common mounting patterns (hole distance) for 22xx, 23xx, 24xx motors are 16x19mm and 16x16mm. Modern 5″ FPV drone frames should support both patterns. The mounting holes of these motors use M3 screws. Use screws with a thread length 2mm longer than the thickness of the arms; for example, for 5mm arms, use 7mm screws, and for 6mm arms, use 8mm screws.

Poles and Magnets
When browsing motors for your FPV drone, you might come across specifications such as “12N14P” printed on the box. Here’s what those numbers mean: the number preceding the letter “N” indicates the number of electromagnets (poles) in the stator, while the number before “P” represents the number of permanent magnets in the bell.

Different motor sizes have varying numbers of poles; for instance, 22XX and 23XX motors generally feature 12 poles and 14 magnets.
The number of poles has a direct impact on motor performance. If there are fewer poles, you can incorporate more iron content into the stator, resulting in greater power output. However, a higher number of poles leads to a more evenly spread magnetic field. This, in turn, provides a smoother-running motor with finer control over the rotation of the bell.
In a nutshell:
- More poles = Smoother performance
- Fewer poles = Increased power
Since FPV drone motors are typically 3-phase, the pole configuration must be a multiple of 3 (i.e., 9, 12, 15, 18, etc.). This is due to the presence of 3 wires connecting to the motor. Consequently, the pole number isn’t easily changed and isn’t a critical factor when selecting motors, particularly for FPV drones. But you should pay attention to the pole number as you have to enter this number in Betaflight when enabling RPM filter. If you can’t find this number, you can simply count how many magnets in the bell.
Motor Windings
The number of copper windings or ‘turns’ on a stator pole determines the maximum current a motor will draw. Simultaneously, the thickness of the wire influences the motor’s ability to handle current before reaching the point of overheating.
In simpler terms, fewer turns translate to less resistance, resulting in a higher KV. However, this also leads to a reduced electromagnetic field on the stator and, consequently, lower torque.
On the flip side, when there are more turns in the coil, the increased copper creates a more substantial magnetic field on the stator pole, generating greater torque. But there’s a catch – the longer wires and higher resistance cause the motor’s KV to decrease.
So, how do manufacturers address these challenges when boosting the power of FPV drone motors? The answer lies in increasing the number of windings while utilizing thicker copper wires. This ingenious approach effectively reduces the winding resistance, thereby improving power without sacrificing efficiency and torque. Moreover, a motor with a larger wire gauge can handle high current without burning out.
It’s important to note, though, that the use of thicker wires and additional windings results in a heavier motor. Additionally, the winding occupies more physical space, which requires a larger stator. That’s why we’re witnessing the emergence of bigger and heavier motors in the market, which also explains their increased power.
Multi-Stranded vs. Single Stranded Windings
When it comes to motor windings, there are two primary options: single stranded and multi-stranded. Each has its own set of advantages and drawbacks, making them suitable for different applications.
Single stranded windings use thicker wires, which handle heat more effectively, making them ideal for demanding flights that pull a lot of amps (e.g. racing, acro, freestyle etc). However, the thicker wires result in larger gaps between them, limiting how many can be wrapped around the stator.
On the other hand, multi-stranded windings replace a single, thicker wire with multiple smaller ones. These thinner wires don’t carry heat as efficiently and are more prone to physical breakage.
Despite these limitations, multi stranded windings might offer superior performance over single stranded windings due to the tighter packing around the stator, with smaller gaps between the wires, resulting in a stronger magnetic field. This can result in improvements in power and efficiency. However, multi-stranded wire generally is more challenging to achieve the same neatness as single-stranded wires, coupled with the fact that there is more insulation layers between multi-stranded coils, it results in more air gaps between the wires, which might offset the benefits mentioned above.
It’s important to note that the neatness of the windings plays a vital role, both aesthetically and electrically. Messy windings with numerous wire crossings lead to less efficient magnetic fields, as the wires don’t cross the stator perpendicularly. So, when evaluating motor windings, don’t overlook the importance of a tidy and well-organized winding job.
Finally, multi-stranded wire can overheat more quickly than single-stranded wire, which impacts raw power and efficiency of the motor. Overall, single-stranded winding is probably the better choice in practice.
Bearing

Motor bearings might not be a frequently discussed topic due to the lack of info online, but they play a crucial role in your FPV drone’s performance. Let’s take a closer look at the basics of motor bearings.
The size of a bearing is determined by the difference between its outer and inner diameters, not the diameters themselves. Wider bearings can accommodate larger balls (or marbles) inside them. While larger balls provide greater durability and crash resistance, smaller balls offer more stability and smoothness at high speeds and RPMs.
Some motors are marketed as featuring “ceramic bearings,” which use ceramic balls instead of steel ones. While these bearings are indeed smoother, they are also more prone to breaking.
The bearing’s inner diameter also dictates the size of the shaft that can be used. A 9mm x 4mm bearing offers a good balance between durability and smoothness.
Popular bearings used in FPV drone motors include Japanese brands such as NSK, NMB, and EZO. Although EZO bearings are often hyped as the best, it’s challenging to quantify their superiority over other brands. Moreover, it’s important to consider the possibility of manufacturers using counterfeit products instead of genuine ones.
Choosing the Right Motor Size for Your Drone
To determine the ideal motor size for your drone, follow this sequence: Frame Size => Prop Size => Motor Size.
By identifying the frame size, you can estimate the appropriate motor size to use. The frame size constrains the prop size, and each prop size demands a different motor RPM to generate thrust efficiently—this is where motor KV comes into play.
Additionally, ensure that the motors produce sufficient torque to spin your chosen propeller. This consideration involves the stator size. In general, a larger stator size and higher KV result in increased current draw.
The table below offers a general guideline. It is not a rigid rule, as you may find people using slightly higher or lower KV motors than the table suggests. However, it serves as a good starting point. This table assumes you’re powering your quad with 4S LiPo batteries, and the frame size refers to the wheelbase (i.e., the diagonal motor-to-motor distance).
For a more detailed table encompassing various prop sizes and LiPo voltages, check https://oscarliang.com/table-prop-motor-lipo-weight/
| Frame Size | Prop Size | Motor Size | KV |
| 150mm or smaller | 3″ or smaller | 1105 -1306 or smaller | 3000KV and higher |
| 180mm | 4″ | 1806, 2204 | 2600KV – 3000KV |
| 210mm | 5″ | 2205-2208, 2305-2306 | 2300KV-2600KV |
| 250mm | 6″ | 2206-2208, 2306 | 2000KV-2300KV |
| 350mm | 7″ | 2506-2508 | 1200KV-1600KV |
| 450mm | 8″, 9″, 10″ or larger | 26XX and larger | 1200KV and lower |
Considering Voltage and Current Draw
Understanding the role of voltage in your motor choice is crucial. When using a higher voltage, your motor will attempt to spin faster, leading to increased current draw. Be mindful of the thrust your motors generate and the current they demand.
Once you have a clear understanding of the current draw for your motor and propeller combination, you can confidently select the right ESC for your drone. Keep in mind that the ESC should be able to handle the maximum current draw of the motor without exceeding its limits to ensure safe and reliable operation. Learn how to choose ESC here: https://oscarliang.com/esc/
How to Evaluate Motor Performance
After narrowing down your motor size, you’ll likely still have several options to choose from. To determine the best motor for your specific needs, take the following factors into account:
- Thrust
- Efficiency and Current Draw
- Weight
Ultimately, your choice of motor will be influenced by your intended application, flying style, and desired performance characteristics.
Thrust
When it comes to choosing a motor for your FPV drone, thrust is often the first thing that comes to mind. After all, it’s the force that propels your drone through the air and allows it to perform those impressive aerial maneuvers.
While higher thrust translates into faster acceleration, it’s crucial not to overlook other factors such as current draw and efficiency. Opting for a motor and propeller combination that demands excessive amperage can put undue strain on your batteries, potentially shortening their lifespan.
If your drone draws a significant amount of current at high throttle, it’s essential to ensure that your battery’s maximum discharge rate is up to the task.
While thrust is undoubtedly a vital aspect to consider when selecting a motor for your FPV drone, it’s essential to weigh it against other factors as mentioned below.
Motor Weight
Motor weight is an often-overlooked factor in FPV drone motor selection, yet it plays a crucial role, especially for high performance drones, such as racing drones and freestyle drones.
Motors are mounted at the four corners of the frame, which means they have a significant impact on the quadcopter’s responsiveness. Heavier motors increase the angular moment of inertia, requiring more torque (not just thrust) for the motors to alter the drone’s attitude.
In real-world flight scenarios, when your quadcopter performs flips and rolls, it takes time to gain angular acceleration, reach the desired position, and then come to a stop. Heavier motors take longer to reach the necessary angular speed and decelerate, making the drone feel less responsive. This is particularly important if your flying style involves rapid changes in direction, such as freestyle and racing. For those primarily focused on cruising in a straight line, like cinematic cruisers, motor weight may not be as critical.
Efficiency and Current Draw
When choosing an FPV drone motor, it’s important to consider motor efficiency, typically calculated by dividing thrust by power at 100% throttle, measured in grams per watt (g/w). A higher number indicates a more efficient motor.
However, don’t just look at efficiency at the top end. Analyze efficiency throughout the entire throttle range, especially around the throttle range you will be mostly fly at. Some motors may be efficient at lower throttle levels but lose efficiency as they draw higher current nearing their limits.
Another useful metric for gauging efficiency is “grams per amp” (thrust/current).
Generally, as thrust increases, so does the current required to produce it. Therefore, motors with high thrust and low current draw are preferable. Inefficient motors may generate insufficient thrust or draw excessive current.
Each motor reacts differently to various propellers. Choosing the right propeller is crucial for balancing thrust and efficiency.
Keep in mind that efficiency and current draw also influence battery selection. An efficient motor with a high current draw may abuse your battery and cause voltage sags, so it’s essential to strike the right balance to optimize your drone’s performance.
Advanced Motors Performance Factors
Some drone motor characteristics are not explicitly mentioned by manufacturers and can only be discovered through more in-depth technical testing. Here are a few advanced factors to consider when selecting a motor:
- Torque
- Response Time
- Temperature
- Vibration and balance
Motor Torque
Torque is the force responsible for turning the propeller, determining how quickly a motor can increase and decrease its RPM. In other words, it gauges how easily a motor can move the rotor, propeller, and most importantly, the air.
The torque of a motor significantly impacts your quad’s performance, specifically its precision and responsiveness during flight. A high-torque motor delivers a snappier response due to faster RPM changes. You may even experience reduced prop wash with increased torque.
Additionally, high torque enables the use of heavier propellers (though at the expense of higher current draw). If a low-torque motor is tasked with spinning a propeller that is too heavy for it (also known as over-propping), the motor will struggle to generate enough force to reach the desired RPM, resulting in poor efficiency and overheating.
However, high-torque motors do have one potential drawback: oscillation. These motors can change RPM so rapidly that they may actually amplify errors (in the flight controller PID loop), leading to oscillations that can be difficult to eliminate even with PID and filter tuning.
Torque is directly influenced by the stator size, generally with a larger stator equating to more torque. Other factors that can increase torque include:
- Stronger magnets
- Minimizing the air gap between permanent magnets and the stator, such as using arc magnets
- Thinner stator laminations
Another advantage of high-torque motors is their increased tolerance for larger propeller pitch and size, allowing them to perform better with a wider range of propellers. However, using lighter propellers can also be beneficial, as RPM changes occur more quickly.
Response Time
Motor response time is closely related to torque, with high-torque motors typically having faster response times. An easy way to measure response time is to assess how long it takes for a motor to reach maximum RPM from 0.
Response time is heavily influenced by the weight and pitch of your chosen propeller. Keep in mind that atmospheric conditions can also play a role. For instance, at lower altitudes, the air is denser, meaning there are more air molecules that the propeller needs to move in order to generate thrust. At higher altitudes, your propellers will spin faster and respond more quickly to throttle changes, but the overall thrust will be diminished due to fewer air molecules for the prop to interact with.
Temperature
Temperature plays a crucial role in the performance and longevity of brushless motors. The magnets used in these motors exhibit a weaker magnetic field at higher temperatures, which can lead to faster demagnetization and affect the motor’s lifespan.
Over-propping your motors or excessively using full throttle can cause your motors to run hot. This, in turn, can degrade the motor’s performance and the magnets over time. As a result, motor designs that facilitate cooling often correlate with longer lifespans.
Vibration
Vibration stemming from motors can lead to several undesirable consequences for your quad’s performance.
A motor with poor balance or subpar build quality may generate vibrations that can impact your PID controller. With vibration frequency changing at different throttle levels, tuning your quad can become increasingly challenging.
Additionally, a motor experiencing vibration will produce more electrical noise than a smoothly running motor. This electrical noise can interfere with your gyro sensor, further hampering flight performance, and may even degrade your FPV video quality if your FPV system is powered directly from the drone battery.
To mitigate vibration issues, most flight controllers come with soft-mounted solutions such as rubber grommets, which provide significant improvements. However, it’s essential to remember that damaged, bent, or unbalanced propellers can also contribute to problematic vibrations. Make sure to inspect your propellers regularly and replace them as needed to maintain optimal performance.
Key Features of FPV Drone Motors
Motor performance can be influenced by many factors, making it a complex and sometimes controversial topic. Motors with the same stator size and KV can exhibit varying thrust, current draw, and response times, even when using identical props. Both design and material choices can significantly impact performance.
In this section, we’ll explore various motor design features that contribute to enhanced performance and can alter the motor’s characteristics.
Motor Shaft
The motor shaft is an integral part of a brushless motor, as it’s responsible for mounting the propeller securely. Most brushless motors designed for 3″, 4″, 5″, and 6″ propellers have M5 shafts with a 5mm diameter.
Motor shaft construction has evolved over time to provide better performance and durability:
- Solid Aluminum Shafts: In the past, motor shafts were made from solid aluminum rods. While they were lightweight, these shafts were less stiff and more prone to bending.
- Hollow Titanium Shafts: To address the issues with solid aluminium shafts, manufacturers began using hollow titanium shafts. These shafts offered similar weight savings but were significantly stiffer and more resistant to bending. However, drilling a hole through the center of the titanium shaft increased production costs.
- Hybrid Shafts: More recently, some motor manufacturers have developed a hybrid shaft design by inserting a steel rod inside the hollow titanium shaft. This innovative design combines the stiffness and strength of steel with the lightweight properties of titanium, providing superior performance and durability.

Magnet Type
Magnets used in brushless motors are graded according to their magnetic field strength, such as N50, N52, N54, with higher numbers indicating a stronger magnetic field. For example, a motor with N52SH magnets will be better than one with N50SH magnets.
A stronger magnetic field theoretically enables the motor to generate power more efficiently, resulting in higher torque and faster response times. However, a motor with a stronger magnetic field will typically produce more notches when turned by hand. This is not necessarily a good thing, as it indicates a less even magnetic field, which can lead to a less smooth motor. You might notice some motors would feel more “notchy” than others when spun by hand, that’s a reflection of how strong the magnets are. Stronger magnets make the motor more notchy.
It’s also important to note that magnets can lose their magnetic strength at high temperatures, which can impact motor performance. To address this issue, motor manufacturers often use N52H magnets, which are designed to withstand high temperatures. Some motors even use N52SH magnets, which are believed to be able to withstand even higher temperatures.
Finally, it’s not uncommon for magnets to become loose in crashes or due to vibration. To fix this issue, you can use Loctite 438 to glue the magnets back in place within the motor bell.
Curved Magnets
Using magnets, also known as arc magnets, is a technique that enables magnets to be brought closer to the stator, allowing for a smaller and more consistent air gap. This, in turn, provides better performance in motors.
With curved magnets, the strongest magnetic point of each pole is no longer on the surface of the magnet, unlike standard non-curved magnets. The epicentre of the field of the pole on the outside of the curve will be below the surface of the magnet, and the epicentre of the pole on the inner curve will actually be above the surface, bringing the magnetic fields of the permanent and electromagnets even closer together.
In addition to the shape of the magnets, some manufacturers test mini quad motors with different thicknesses of magnets, and have found that a slightly thinner magnet (and therefore a weaker magnetic field) can also make a noticable difference in performance.
Air Gap
“Air gap” in a motor refers to the distance between the permanent magnets and the stator. Magnetic force degrades non-linearly with distance, so reducing the gap between the two significantly boosts the power of the motor. A smaller air gap not only makes the motor more powerful, it also improves torque and response.
The downside of tighter airgap is the increase in current draw and decrease in efficiency. Also there is concern regarding durability, if the motor bell takes any sort of impact and it gets out of alignment and shifted at all, the magnet can run into the stator and end up getting shattered.
Stator Laminations
A lamination is the thickness of the individual sheets of metal stacked up in the motor stator. Thinner lamination allows for more layers of stator plates to be stacked for the same height of the motor stator.
In general, thinner stator laminations are better for motor performance. They help to reduce a phenomenon known as Eddy Current, which generates heat in a changing magnetic environment. Thinner laminations mean less power is wasted on generating eddy currents, resulting in more efficient and powerful motors.

Motor Stator Lamination
C-Clip / Shaft Screw
When it comes to securing the motor shaft, FPV drone motors use one of three methods: C-clips, E-clips, or screws. Each method has its own set of advantages and disadvantages, making it difficult to determine which one is the best.

C-Clip vs. Screw on the bottom of a Motor Shaft
Generally speaking, screws are easier to remove and are better for user maintenance than C-clips or E-clips. However, screws have a higher risk of being over-tightened, which can lock the shaft and make the motor harder to spin.
On the other hand, there have been reports of C-clips popping off during flight, which can cause the motor bell to fly off and lead to a crash. While screws may seem like a safer option, they are not immune to this problem.
Aluminium Alloy
The metal used for the motor bell and motor base determines the durability of the motor. There are two common types of aluminium alloy used in FPV motors: 7075 and 6082. The number designates the different series of aluminium alloy grades and chemical composition.
In a nutshell, 6082 has more ductility and is more formable while 7075 is more rigid and hold up better against crashes. 6082 is used back in the days before 2016/2017, but 7075 is the most common in modern motors and is thought to be stronger against impact.
Unibell
There are two types of bell designs: 2-piece bell design, and Unibell design.
The 2-piece bell design involves a machined top aluminum part coupled with a steel flux ring bonded below it, a traditional and widely used construction in motors.
The Unibell design features an aluminum bell extending down over a steel flux ring – like a thin protective sheath surrounding the steel flux ring.
The one-piece construction of the Unibell design adds a slight weight gain to the motor over two-piece bell design, however it improves durability and reduces the risk of the motor bell slipping down—a common issue in some two-piece bell designs. Motors with a two-piece design can suffer from a separation of the flux ring from the top part of the bell during a hard crash, rendering the motor useless. However, this is virtually unheard of with the Unibell design due to the extensive adhesive area, which ensures a firm and secure bond between the two components.
Despite the small weight penalty, the added durability provided by the Unibell design justifies the cost in my opinion. After all. A negligible increase in weight leads to a substantial gain in resilience, a trade-off that’s worth making.
Flux Ring Design
A flux ring is the round steel ring inside the bell that contains the magnets. The bell is usually made of aluminium, while the flux ring is made of steel because it has to respond to magnetic field lines.
The latest flux ring design is a custom shape instead of the usual round shape, which can help direct more magnetic field lines back into the motor and improve the torque.
O-Ring
O-ring under inside of the motor bell is a great feature to have in a motor.
The o-ring acts as a buffer/cushion, absorbing some of the shock from physical impacts. This can help maintain the smoothness of the bearing over a longer period, potentially increasing the lifespan of the motor. The added protection the o-ring provides can also reduce maintenance needs and the frequency of part replacements, offering both economic and practical benefits to the users.
Bottom Design
In motor base design, there is the more traditional “closed bottom” approach, and the more recent “naked bottom” style. There are pros and cons to both of these designs.

Motor with Naked Bottom (Open Motor Base)

Motor with closed bottom
The “closed bottom” design means a stronger base, however the “naked bottom” tend to be lighter by removing the excess material, the weight saving is around 2g.
Closed base motors are less likely to get dirt trapped inside the bell, against the argument that, naked bottom are easier to clean the dirt out.
With naked bottom, you can see clearly how far the screws are going in, and you have less chance of shorting the motor winding if the screws are too long. (This happens often to beginners with closed bottom motors.)

Naked bottom motors are easy to get dirt inside the motor, but it’s also easier to clean
However, the closed bottom provides better strain relief to the wires in case of crashing and stretching.
Silver Plated Copper Wires
Both silver and copper are renowned for their exceptional conductivity. But silver, being a larger atom with more internal electron shells, holds onto its outermost electron very loosely. This means it can more readily dissociate its electrons, allowing them to move more freely through the metal to carry heat and electricity. Thus, silver is an even better conductor than copper.
By plating silver onto the outside of copper wire, you enhance its electrical and thermal conductivity, which are both beneficial for motors.
However silver plated copper wires are way more expensive than normal copper wires, therefore it’s not very common in budget motors.
PoPo Technology
The “Pop on Pop off” system is basically a motor shaft with spring loaded bearing for installing and removing props quickly. For a more detail overview and product list check out this article.

Other Features
- Soldering tabs
- ESC integration
- Cooling design
Motor manufacturers are constantly experimenting with different designs and levels of hardware integration, which has led to advances in cooling and even integrating ESC inside the motor. Personally I think solder tabs on the motor can come in handy, it allows you to use a lighter gauge wire to save weight on less amp hungry applications. They should also be easily repairable if the wires get pulled off, which can often spell the end of a motor of typical design.
CW and CCW Drone Motors
You will rarely see brushless motors labelled as CW (clockwise) and CCW (counter clockwise).
This does not indicate the direction the motor spins. Brushless motors can spin either direction. This label differentiates the direction that the motor bolt is threaded. This is done so that as the motor spins, the torque from the propeller pushes the motor nut to tighten rather than loosen. This keeps your props from loosening and coming off while you fly. This means you will need two of each for your 4 motor layout in standard Betaflight rotation.
- Front Left: CW
- Front Right: CCW
- Back Left: CCW
- Back Right: CW
To tell if you have the correct threaded motor on, simply hold the prop nut on the shaft, then start turning the motor with your hand in the direction it should spin. If the nut tightens then you have the correct one 🙂
Personally I prefer to have the same threads on all my motors, so I don’t confuse myself with the different prop nuts. If you have to replace a prop nut at the hardware store, it can be a real headache trying to find a CCW threaded nuts (or more commonly in the hardware jargon, a ‘left hand thread nut’). Prop nuts these days are lock nuts (have rubber inside), they stay on relatively well when tightened down and doesn’t get loose easily.
Edit History
- 2013 – Article created
- 2016 – Added motor recommendations
- 2017 – Added “Motor Features”
- 2018 – Added info about windings, poles, bearing, Torque, mounting pattern, PoPo technology
- 2019 – Added info about ESC connection
- 2022 – Added info about Unibell
- 2023 – Article revised, updated product links
- May 2024 – Updated product links.




{kind=link}