
A new wheeled robot is able to climb metal structures in a very clever and unique way – it uses an extendible tape-measure limb. Descendants of the bot may one day find use inspecting or even repairing things like towers, bridges, power stations and ships.
Although we have seen other robots that can make their way up vertical metal surfaces, most of them utilize either a combination of vacuum systems and wheels, or legs with magnetic feet. The former bots often can’t make their way over even relatively small obstacles, however, while the latter ones tend to be slow-moving and mechanically complex.
That’s where the EEWOC (Extended-reach Enhanced Wheeled Orb for Climbing) is designed to come in. The experimental robot was created by Justin Quan, Mingzhang Zhu and Dennis Hong from UCLA’s Robotics & Mechanisms Laboratory (RoMeLa).
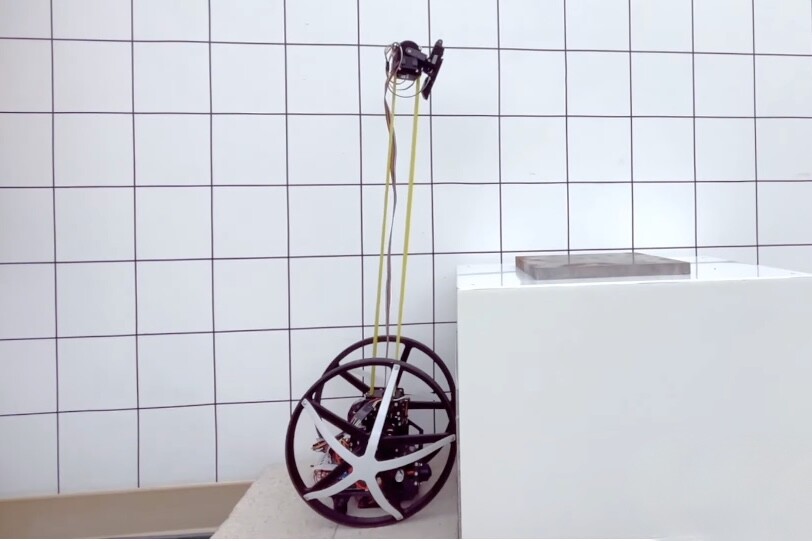
When on the ground or other horizontal surfaces, the self-balancing bot rolls along on its two wheels. Once it’s time to get climbing, though, the EEWOC vertically extends a little something known as its EEMMMa (Elastic Extending Mechanism for Mobility and Manipulation) limb.
RoMeLa
This device incorporates a motorized spool of metal measuring tape located inside the robot’s body. The tape itself extends straight up out of the robot, bends around to form an upside-down U shape, then runs back down to be anchored to the top of the bot.
At the bend in the inverted U, the tape runs over a pulley inside an “end-effector” tool. Among other things, this tool incorporates a top-mounted adjustable-angle electromagnet.
For straight-up climbing, the EEMMMa starts by extending its tape. Doing so causes the limb to lengthen (up to a maximum reach of 1.2 m/3.9 ft), with the end-effector tool always staying in the bend at the top. The magnet on that tool then grips the metal, after which the robot pulls itself up to the tool simply by winding the tape back onto its spool. When the EEMMMa is released and re-extended for the next leg of the climb, the robot stays in place on the metal structure using a bottom-mounted magnet of its own.

RoMeLa
For climbing up and around ledges, the EEMMMa still extends its tape but the end-effector essentially applies a brake, keeping the tape from moving through it. This causes the tape to bunch up and kink at a right angle, letting the magnet reach its otherwise-inaccessible target. The bot then pulls itself up to the magnet, rolling over the ledge in the process. This video provides a more detailed explanation of how the limb works.
Novel Extending and Bending Robotic Limb EEMMMa – ASME JMR 2022 2-Minute Overview
In its current form, the EEWOC has a diameter of 260 mm (10.2 in) and it tips the scales at just 2.1 kg (4.6 lb). The robot also has a maximum climbing speed of 0.24 meters per second (0.79 ft/s), reportedly making it one of the fastest climbing robots ever made.
Future plans include equipping the bot with multiple EEMMMa’s that can be extended in different directions for omnidirectional movement. The scientists also envision utilizing non-magnetic EEMMMa grippers that can instead grasp surfaces such as trees or walls.
You can see the robot in metal-climbing action, in the video below – the thing can even be seen swinging across horizontal gaps, Indiana-Jones-style. Papers on both the EEWOC and the EEMMMa were presented at the rather long-named ASME 2023 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference.
A Climbing Robot with Long Extending and Bending Tape Measure Limb – EEWOC
Source: RoMeLa via IEEE Spectrum




{kind=link}