
An experimental new undersea robot shows great promise for use in the upkeep of offshore renewable energy platforms. Because it has the ability to climb vertical underwater surfaces – and paint them – it’s known as the Crawfish.
Whether they’re harnessing the power of the wind, tidal currents or waves, offshore energy structures require regular inspection, maintenance, and repairs. Divers are typically recruited to perform the underwater aspects of these jobs, although using such personnel can be costly and time-consuming … not to mention risky to the divers themselves.
That’s where the Crawfish comes in. Developed by scientists at Germany’s Fraunhofer Smart Ocean Technologies research group, the tethered device is actually made up of two linked components.
On top is a commercially available BlueROV2 remotely operated vehicle made by California-based company Blue Robotics. On the bottom is a crawler unit which features four direct-drive elastomer wheels along with a variety of tools such as a camera, brush, and special sensor-reading head.
Fraunhofer
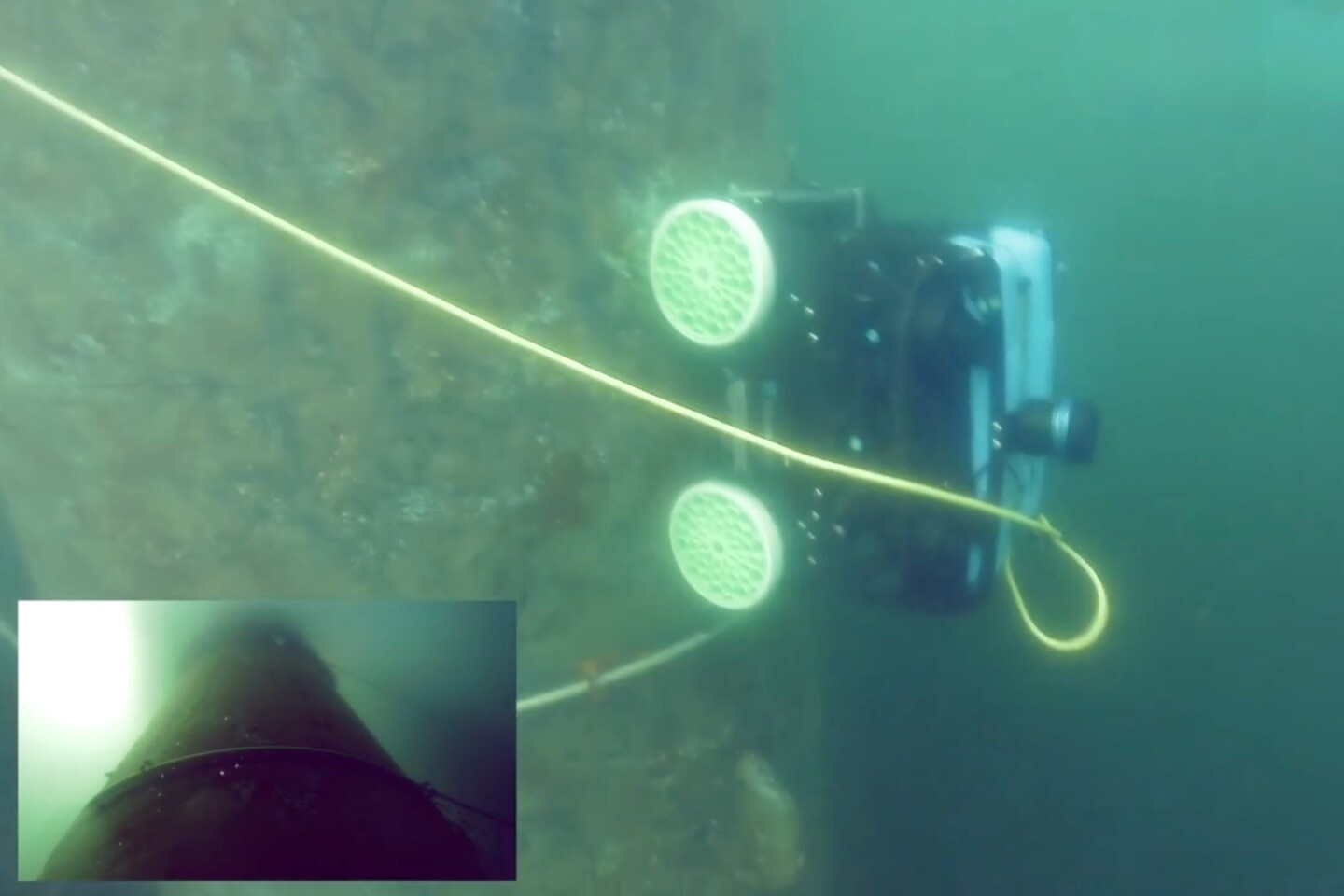
Because the robot weighs just 22 kg (48.5 lb), it can be lowered into the water by two or three human workers – no crane is required. Once the device is underwater, a topside operator remotely steers it over to the structure utilizing the BlueROV2’s camera and thrusters.
Upon reaching the vertical surface of the platform, the BlueROV’s thrusters apply up to 90 Newtons (20 lb-force/9 kg-force) of “downward” force (or horizontal force, depending on how you look at it), keeping the Crawfish held firmly in place. The robot then makes its way along the surface using its powered wheels.
As the bot does so, its camera is used to remotely check for damage to the structure’s anti-corrosion paint, while its reader head is used to wirelessly obtain data from CoMoBelt sensor collars located at various points on the platform. These collars, which are made by Fraunhofer, detect cracks in seam welds via integrated ultrasonic transceivers.
If damage to the paint is detected, it can be patched using a two-part coating material which is injected into the robot’s remotely operated brush. Faulty welds could conceivably also be fixed using an onboard welding head.
In its current form, the Crawfish can descend to a maximum depth of 50 m (164 ft) and is able to crawl (using 50 Newtons of downforce) for 25 minutes per battery-charge. You can see it in free-swimming and structure-crawling action, in the video below.
Fraunhofer Crawfish offshore energy platform robot
Source: Fraunhofer




{kind=link}