
Inspections of tall metal structures or machines can be difficult for people to perform up-close and in person, and while aerial drones may help, their limited battery life is a problem. That’s where the magnetic-footed Magnecko robot is intended to come in.
Created by a team of eight engineering bachelor students at Switzerland’s ETH Zurich research institute, the quadruped robot is inspired by the wall- and ceiling-climbing capabilities of the gecko. Whereas the lizard utilizes tiny hair-like footpad structures called setae, however, Magnecko uses special electro-permanent magnet modules developed at ETH’s Robotic Systems Lab.
Each module is made up of multiple smaller magnets that can be repeatedly magnetized and demagnetized within a fraction of a second via a short electric pulse. Importantly, the magnets don’t require any electricity to stay in either state. They’re also very powerful when magnetized – just one foot foot can hold up to 2.5 times the robot’s total weight.
So yes, the thing can walk completely upside-down.
Magnecko/ETH Zurich
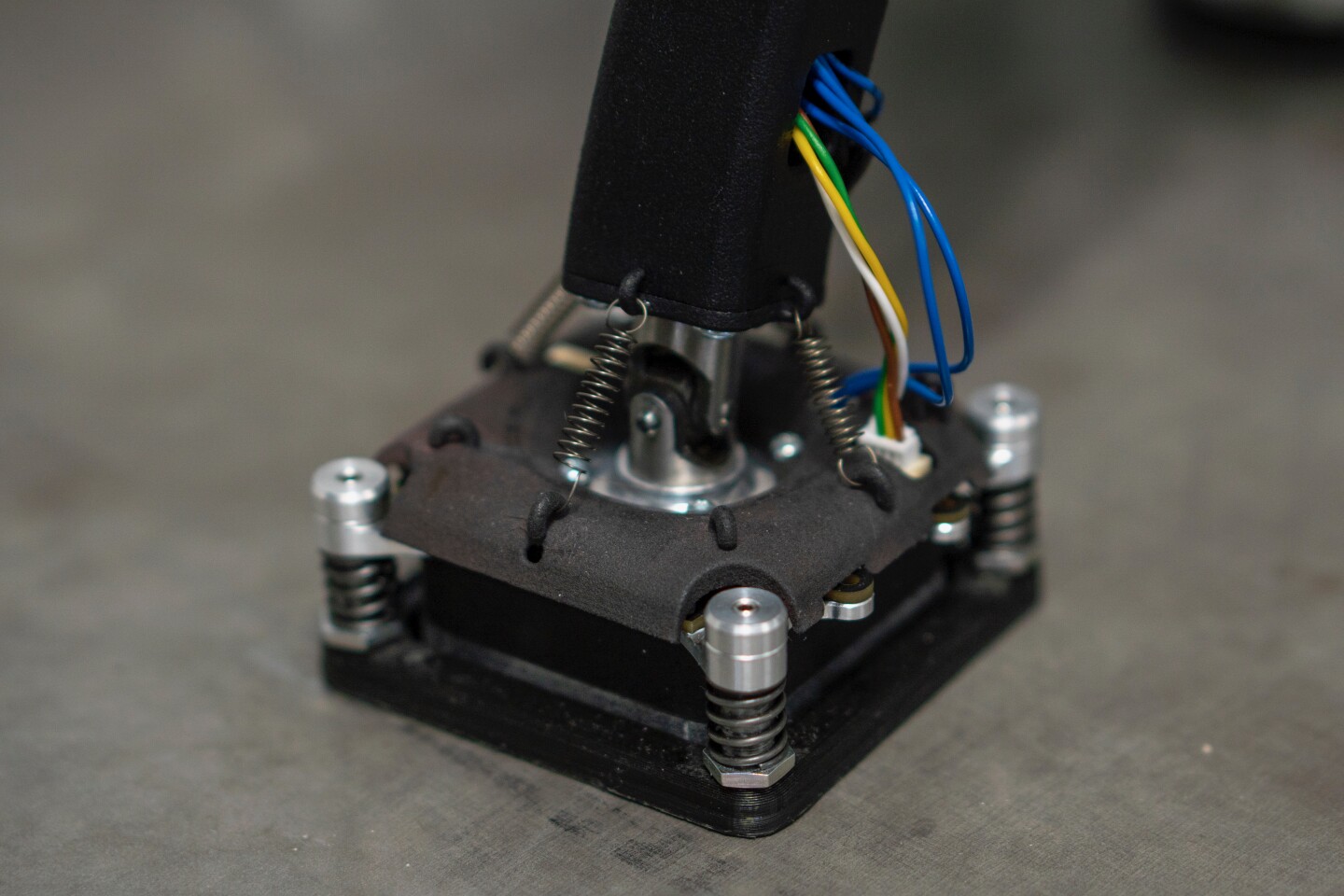
In its current incarnation, Magnecko has to be told where to go by an operator using a wireless handheld controller. That said, the bot proceeds to follow that route on its own, autonomously transitioning between walking on vertical and horizontal ferromagnetic surfaces. Spring-loaded rubber foot pads help it maintain traction as it does so.
Down the road, plans call for the robot to be capable of autonomous obstacle avoidance and route planning … and it may end up doing more than just checking on structures.
“We plan on preparing the robot for inspection work first, but nothing prevents it from doing autonomous maintenance or remotely operated repairs in the future,” team member Nicolas Faesch told us. “It can support payloads of several kilograms and with its insect-style configuration, it can easily position itself as required. Surveillance is also a very interesting use case since the robot can hang in one spot for multiple hours to perform a task, thanks to the special magnetic feet that don’t require any power to stay magnetized.”

Magnecko/ETH Zurich
Faesch and colleagues are now working on improving the robot, and are in discussions with industry experts regarding real-world testing. You can see the current prototype in action, in the video below.
And for another example of a magnetic-footed wall-walking quadruped robot, check out the Korea Advanced Institute of Science and Technology’s MARVEL.
magnecko – legged robot climbing on walls and ceiling
Source: Magnecko project




{kind=link}