
While most of us may just think of krill as baleen whale food, the tiny crustaceans are also very adept swimmers … enough so that scientists have now developed a krill-inspired robotic platform in hopes of one day creating swarms of ocean-exploring swimming robots.
Measuring about two inches long (51 mm), krill move through the water via what is known as metachronal swimming.
Also utilized by arthropods like shrimp and crayfish, this type of locomotion involves sending sequential waves of movement through rows of “swimming legs” (aka pleopods or swimmerets) on the animal’s underside. It works well, as krill are able to accelerate and stop quickly, and execute sharp, fast turns.
In order to better understand the mechanics of metachronal swimming, researchers from Rhode Island’s Brown University teamed up with colleagues at the Universidad Nacional Autónoma de México to create the krill-inspired Pleobot robotic platform.
Wilhelmus Lab
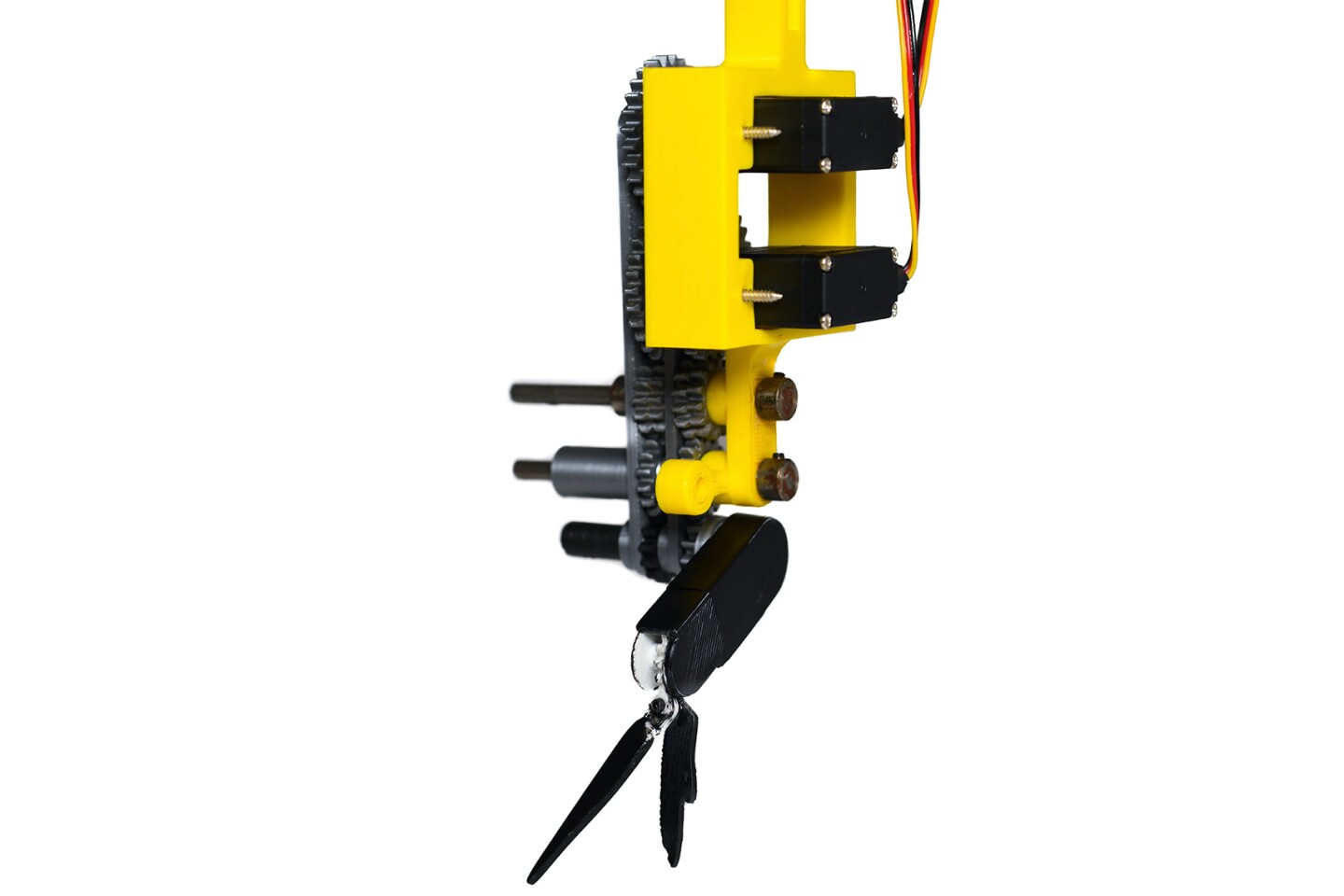
The articulated device – which is 10 times the size of an actual krill – incorporates an artificial pleopod made of two 3D-printed segments. As the top segment is moved forward and backward by a powered gearing system, the lower segment passively sways back and forth through the water, simulating the manner in which real pleopods sequentially open and close.
“Experiments with organisms are challenging and unpredictable,” said Brown engineering PhD candidate Sara Oliveira Santos, lead author of the study. “Pleobot allows us unparalleled resolution and control to investigate all the aspects of krill-like swimming that help it excel at maneuvering underwater.”
While more research needs to be conducted before any complete krill robots can be built, the Pleobot has already helped the scientists figure out how krill are able to generate lift while swimming forward. The platform revealed the manner in which a low-pressure region at the back of the pleopod boosts lift force as the appendage moves through its power stroke.
“This study is the starting point of our long-term research aim of developing the next generation of autonomous underwater sensing vehicles,” said the project leader, Brown’s Asst. Prof. Monica Martinez Wilhelmus. “Being able to understand fluid-structure interactions at the appendage level will allow us to make informed decisions about future designs.”
A paper on the study was recently published in the journal Scientific Reports. The Pleobot can be seen in action, in the video below.
Pleobot krill-inspired robotic platform
Source: Brown University




{kind=link}